Die Roboterprogrammierung entwickelt sich rasant weiter, um den steigenden Anforderungen an Effizienz, Flexibilität und einfache Bedienbarkeit gerecht zu werden. Während herkömmliche Programmiermethoden oft komplex und zeitaufwendig sind, ermöglichen neue Ansätze wie RoboHive AI und Teaching-by-Methoden eine deutlich einfachere und schnellere Interaktion mit Robotern – ohne aufwendige Codeeingabe oder komplexe Parametereinstellungen.
RoboHive AI – Die Zukunft der Roboterprogrammierung
Durch eine KI-gesteuerte Benutzeroberfläche können komplette Roboterstationen in natürlicher Sprache programmiert werden – ohne komplizierte Codeeingabe oder umständliche Parametereinstellungen. Mit RoboHive AI lassen sich Roboter intuitiv steuern, indem der Anwender die gewünschten Abläufe einfach beschreibt. Die KI interpretiert die Anweisungen und wandelt sie automatisch in ausführbare Befehle um. Dies vereinfacht nicht nur den Programmierprozess, sondern macht die Technologie auch für Anwender ohne spezifische Programmierkenntnisse zugänglich.
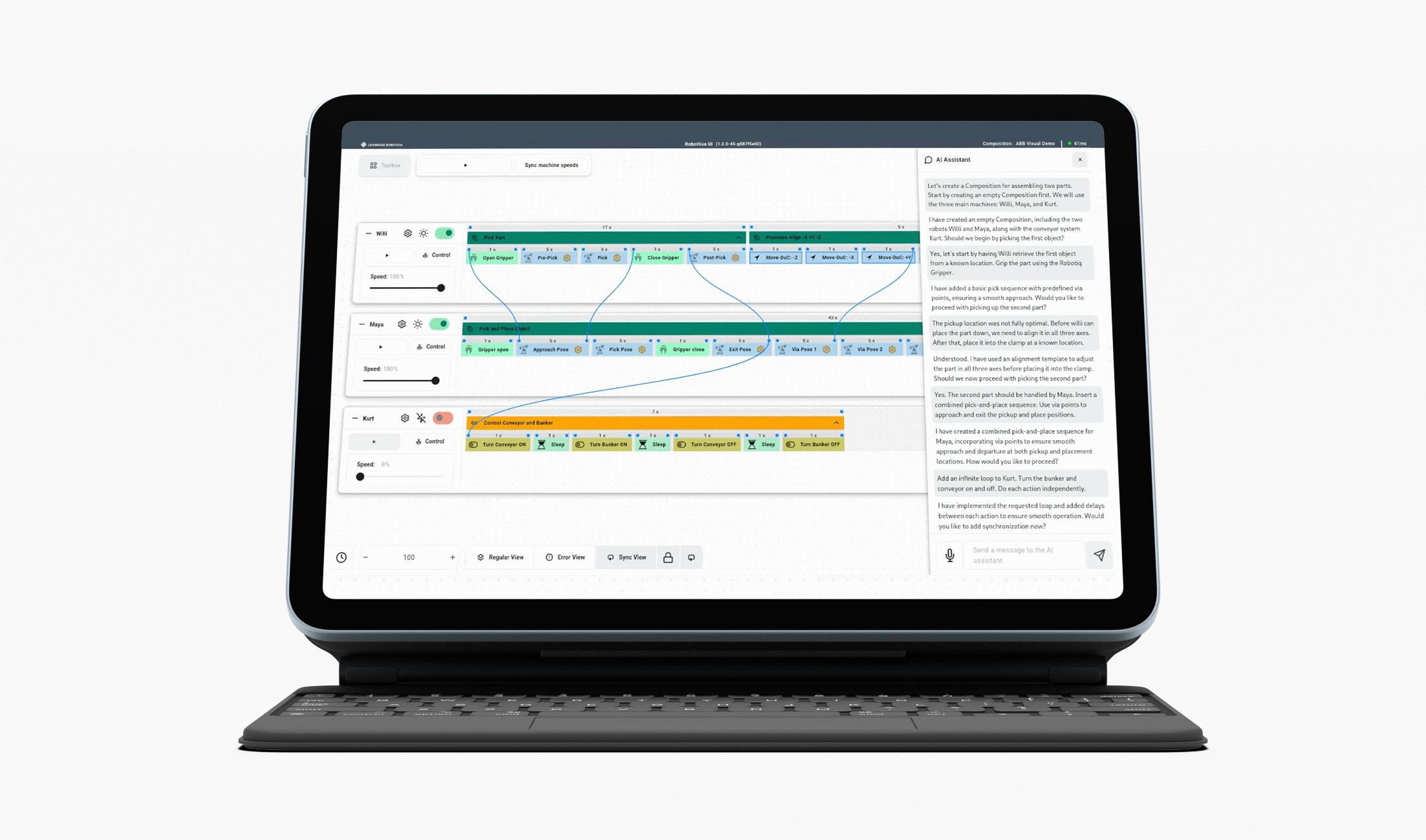
Zeitbasierter, visueller Drag-and-Drop-Workflow
Neben der Sprachsteuerung bietet RoboHive AI eine innovative, visuelle Drag-and-Drop-Schnittstelle, die zeitbasierte Abläufe ermöglicht. Dadurch lassen sich:
- Bewegungssequenzen klar visualisieren
- Komplexe Arbeitsprozesse koordinieren und optimieren
- Abläufe flexibel anpassen, ohne in den Code eingreifen zu müssen
Diese intuitive Steuerung vereinfacht die Umsetzung anspruchsvoller Applikationen und ermöglicht eine schnellere Inbetriebnahme von Robotersystemen. Die Kombination aus KI-gestützter Programmierung und visueller Workflow-Gestaltung ermöglicht eine höhere Agilität in der Produktion.
✔ Schnellere Integration neuer Prozesse
✔ Weniger Programmieraufwand und Fehlerquellen
✔ Geringere Arbeitskosten durch schnelle Anpassungen
Teaching-by-Methode: Das Konzept der intuitiven Roboterprogrammierung
Die intuitive Roboterprogrammierung ermöglicht es, einen Roboter ohne manuelle Codeeingabe zu programmieren. Statt Befehle in einer Programmiersprache zu schreiben, werden Bewegungen direkt vorgeführt und automatisch gespeichert.

Roboter lernen durch Vormachen
Bei der Teaching-by-Methode führt der Bediener den Roboter per Hand oder über ein Steuerungssystem in die gewünschten Positionen. Der Roboter speichert diese Bewegungen als Wegpunkte und generiert daraus selbstständig ein ausführbares Programm. Dabei werden nicht nur einfache Pick-and-Place-Aufgaben, sondern auch komplexe Bewegungsabläufe erfasst.
Vorteile gegenüber codebasierter Programmierung
- Schnellere Einrichtung: Keine manuelle Programmierung erforderlich, was die Inbetriebnahme beschleunigt.
- Einfache Bedienung: Auch ohne tiefgehende Programmierkenntnisse lassen sich Aufgaben effizient definieren.
- Hohe Flexibilität: Änderungen im Prozess können durch erneutes Vormachen schnell angepasst werden.
- Reduzierte Stillstandszeiten: Schnelle Umprogrammierung ermöglicht eine dynamische Reaktion auf neue Anforderungen.
Diese Methode verbessert die Effizienz in der Produktion und erleichtert den Einsatz von Robotern in variablen Anwendungen.
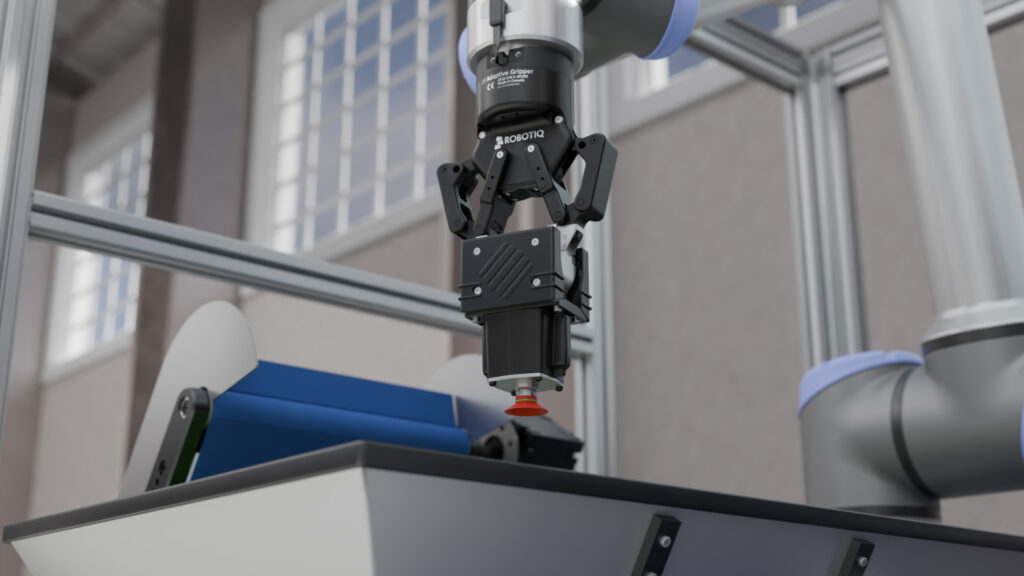
Free-Drive-Modus für flexible Bewegungsführung
Im Free-Drive-Modus kann der Roboter per Hand bewegt werden. Dies ermöglicht eine präzise Führung des Roboters entlang der gewünschten Bahn, ohne dass vorher Koordinaten oder Befehle eingegeben werden müssen. So lassen sich auch komplexe Bewegungsabläufe intuitiv definieren.
Speicherung von Wegpunkten per Fußschalter
Während der Roboter im Free-Drive-Modus geführt wird, können Wegpunkte per Fußschalter gespeichert werden. Dies erlaubt es dem Bediener, beide Hände für die eigentliche Aufgabe freizuhaben. Jeder gespeicherte Punkt wird in das automatisch erstellte Roboterprogramm integriert und kann anschließend weiter verfeinert werden.
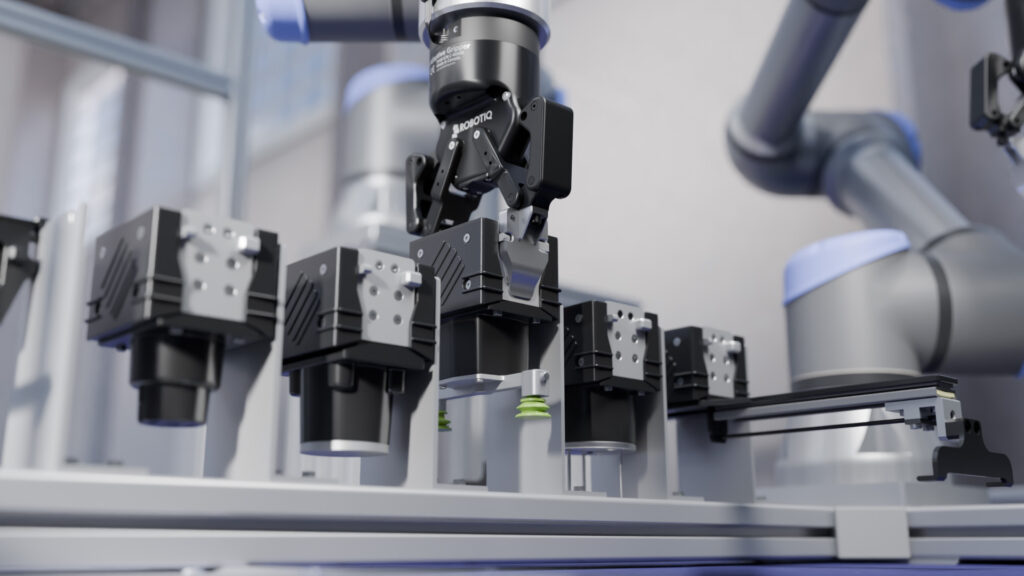
Flexibilität durch das Greifer-Schnellwechselsystem
Ein wichtiger Faktor für eine effiziente Roboterprogrammierung ist die Fähigkeit, verschiedene Handhabungsaufgaben ohne aufwendige Umrüstung auszuführen. Das Greifer-Schnellwechselsystem mit ToolCubes ermöglicht den automatisierten Wechsel zwischen unterschiedlichen Greifmodulen und erhöht so die Flexibilität in der Produktion.
Modulare ToolCubes für verschiedene Handhabungsaufgaben
Die ToolCubes sind modular aufgebaut und für verschiedene Greiftechnologien ausgelegt. Dadurch kann ein einziger Roboter unterschiedliche Objekte handhaben, ohne dass manuelle Anpassungen erforderlich sind. Das System unterstützt eine Vielzahl von Anwendungen, von Verpackungslösungen bis hin zur Maschinenbeladung.
Automatisierter Wechsel zwischen verschiedenen Greifern
Das Greifer-Schnellwechselsystem ermöglicht einen nahtlosen Wechsel zwischen verschiedenen Greifern. Dies reduziert Rüstzeiten und erlaubt eine dynamische Anpassung an wechselnde Produktionsanforderungen.
Magnetgreifer – Für ferromagnetische Bauteile
Einfacher Vakuumgreifer – Zum Greifen flacher Oberflächen
Doppelter Vakuumgreifer – Für größere oder stabilere Sauggreif-Anwendungen
Oberflächengreifer – Stabile Fixierung schwerer und flacher Objekte
Erweiterungsgreifer – Größere Spannweite für sperrige Bauteile
3-Finger-Greifer – Präzises Zentrieren und Greifen kleiner oder zylindrischer Objekte
Farblich markierte ToolCubes im Interface für intuitive Bedienung
Um den Wechselprozess noch intuitiver zu gestalten, werden die ToolCubes im Interface farblich markiert. Der Bediener sieht auf einen Blick, welches Werkzeug aktiv ist und welche Aktion als Nächstes erfolgt. Dies erleichtert die Roboterprogrammierung und sorgt für eine fehlerfreie Bedienung.
Praxisbeispiel: Verpackungsautomation in nur 3,5 Minuten
Ein großer Vorteil der Roboterprogrammierung mit ToolCubes ist die schnelle Umsetzung von Automatisierungsaufgaben. Um zu verdeutlichen, wie einfach sich dabei verschiedene Greifer und Objekte handhaben lassen, betrachten wir ein konkretes Beispiel: Drei unterschiedliche Objekte werden nacheinander mithilfe dreier verschiedener Greifmodule aufgenommen und in eine Kiste gelegt – und das alles innerhalb von nur 3,5 Minuten Programmierzeit, ganz ohne manuelles Codieren.
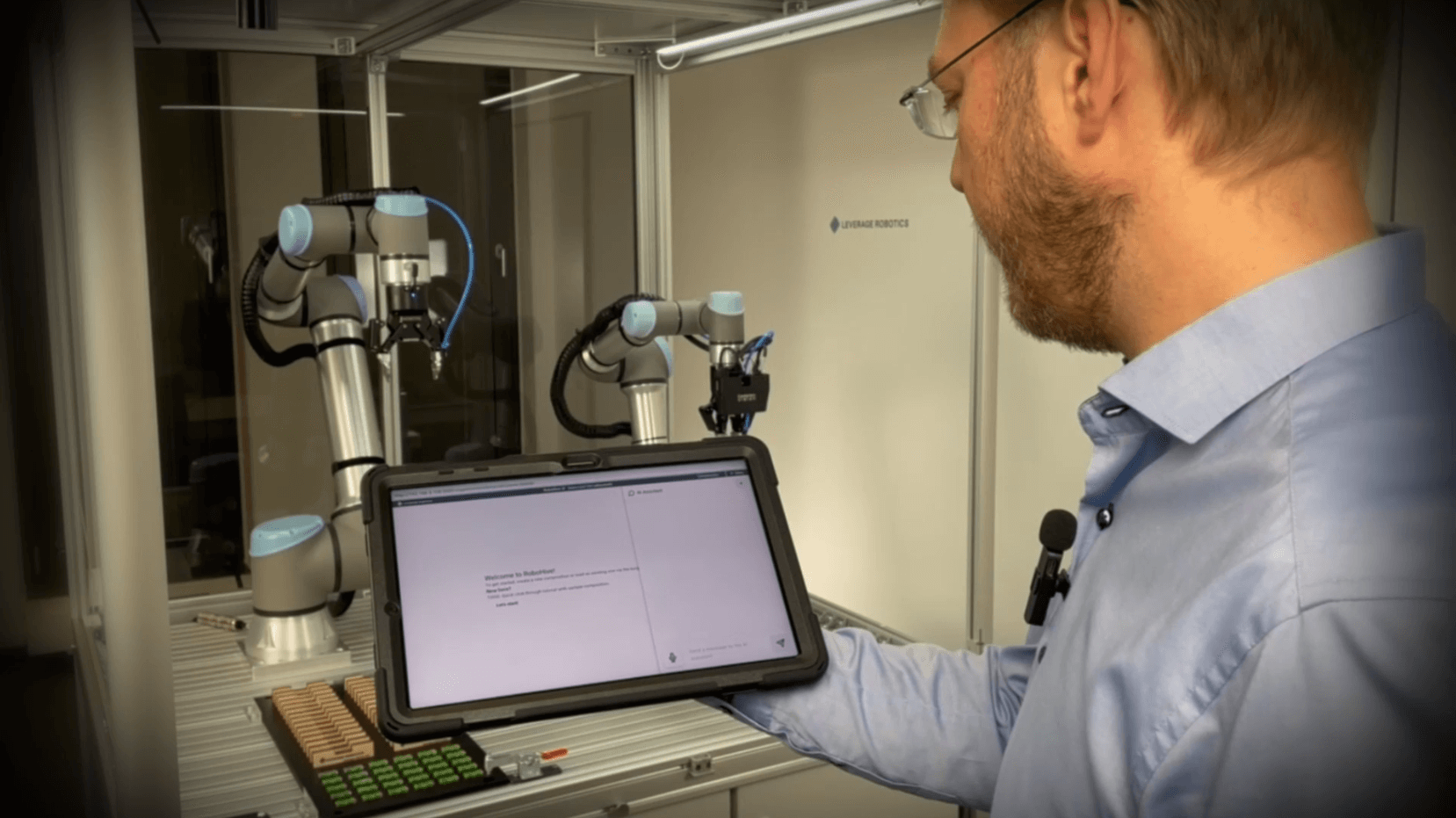
Schritt-für-Schritt-Prozess der Roboterprogrammierung
1️⃣ Free-Drive-Modus aktivieren: Durch Betätigung des Fußschalters kann der Roboter manuell bewegt und in die gewünschte Position geführt werden.
2️⃣ Werkzeugaufnahme: Der Roboter wird über den gewünschten ToolCube geführt, welcher automatisch erkannt und aufgenommen wird.
3️⃣ Wegpunkte speichern: Während der Bewegung werden per Fußschalter relevante Positionen festgelegt, z. B. wo das Produkt aufgenommen und abgelegt wird.
4️⃣ Automatische Programmgenerierung: Die erfassten Bewegungen werden in Echtzeit in ein ausführbares Roboterprogramm umgewandelt.
5️⃣ Optimierung & Feinanpassung: Falls notwendig, kann das automatisch erstellte Programm noch angepasst und optimiert werden.
Anpassung der Payouts und automatische Ausführung der Anwendung
Nach der Programmierung erfolgt die Anpassung der Payouts, also der Gewichts- und Handhabungsparameter für die gegriffenen Objekte. Dies stellt sicher, dass der Roboter das Verpackungsgut korrekt transportiert. Anschließend wird die Anwendung gestartet – der Roboter führt den kompletten Verpackungsprozess vollautomatisch aus, ohne dass weitere Eingriffe erforderlich sind.
Fazit
Die Roboterprogrammierung befindet sich in einem Wandel, der die Automatisierung noch zugänglicher, effizienter und flexibler macht. Durch RoboHive AI und Teaching-by-Methoden wird der Programmierprozess erheblich vereinfacht, sodass selbst komplexe Abläufe ohne tiefgehende Programmierkenntnisse realisiert werden können.
Mit RoboHive AI lassen sich Roboterstationen in natürlicher Sprache steuern und programmieren. Die KI wandelt Anweisungen automatisch in Befehle um, während die zeitbasierte Drag-and-Drop-Schnittstelle eine klare Visualisierung und Anpassung von Prozessen ermöglicht. Dadurch können Unternehmen ihre Produktionsabläufe schneller optimieren und Kosten reduzieren.
Die Teaching-by-Demonstration-Methode bietet eine weitere Möglichkeit zur intuitiven Programmierung. Durch den Free-Drive-Modus und das Speichern von Wegpunkten per Fußschalter kann der Roboter direkt geführt werden, während er automatisch ein ausführbares Programm erstellt.
Beide Methoden reduzieren den Zeitaufwand für die Programmierung, minimieren Fehlerquellen und machen die Technologie für eine breitere Anwendergruppe zugänglich.
Effiziente Produktionsprozesse mit smarter Roboterprogrammierung
Steigern Sie die Effizienz Ihrer Automatisierung mit intuitiver Roboterprogrammierung und RoboHive AI von Leverage Robotics. Nutzen Sie KI-gestützte Roboterprogrammierung und optimieren Sie Ihre Abläufe mit natürlicher Sprache & visuellen Workflows.
✅ Schnelle Inbetriebnahme ohne Programmieraufwand
✅ Flexibler Wechsel zwischen verschiedenen Greifern
✅ Einfache Anpassung an wechselnde Produktionsanforderungen
FAQ – Häufig gestellte Fragen zur Roboterprogrammierung mit RoboHive AI oder Teaching-by
Wie funktioniert die Roboterprogrammierung mit RoboHive AI?
RoboHive AI nutzt eine KI-gesteuerte Benutzeroberfläche, die es ermöglicht, Roboterstationen in natürlicher Sprache zu programmieren. Anstatt Code zu schreiben, gibt der Anwender Anweisungen in Alltagssprache, die von der KI in ausführbare Befehle umgewandelt werden.
Was ist der Vorteil der zeitbasierten Drag-and-Drop-Schnittstelle?
Diese visuelle Benutzeroberfläche ermöglicht die Darstellung von Bewegungsabläufen auf einer Zeitachse, wodurch sich Prozesse leichter anpassen und optimieren lassen. Komplexe Arbeitsabläufe können intuitiv erstellt und flexibel koordiniert werden.
Wie unterscheidet sich Teaching-by-Methode von RoboHive AI?
Während RoboHive AI auf Befehle in natürlicher Sprache und visuelle Workflows setzt, basiert die Teaching-by-Methode auf direkter Bewegungsvorgabe: Der Bediener führt den Roboter per Hand im Free-Drive-Modus. Das System speichert die Bewegungen automatisch als ausführbares Programm.
Was bedeutet es, dass die ToolCubes „rein passiv“ sind?
ToolCubes benötigen keine externe Energieversorgung, da sie durch den 2-Finger-Greifer des Roboters mechanisch aktiviert werden. Dies reduziert den Wartungsaufwand und ermöglicht eine einfache Integration ohne zusätzliche Verkabelung oder Steuerung.
Können Hindernisse im Bewegungsablauf berücksichtigt werden?
Ja, durch das Speichern von Wegpunkten per Fußschalter können Hindernisse manuell umfahren werden. Der Roboter merkt sich diese Punkte und integriert sie automatisch in das generierte Programm.
Ist das System für unterschiedliche Greifaufgaben geeignet?
Ja, das Greifer-Schnellwechselsystem ermöglicht einen schnellen Wechsel zwischen Magnet-, Vakuum- und anderen Greifern, sodass verschiedene Objekte flexibel gehandhabt werden können.
Was passiert nach der automatischen Programmgenerierung?
Das erstellte Roboterprogramm kann direkt genutzt oder nachträglich optimiert werden. So lassen sich beispielsweise Bewegungen anpassen oder neue Greifpunkte ergänzen, um die Effizienz weiter zu steigern.