In vielen industriellen Anwendungen müssen metallische Werkstücke präzise, sicher und schnell gehandhabt werden. Durch die Nutzung magnetischer Kräfte ermöglichen Magnetgreifer das sichere Fixieren und Lösen von Metallteilen in verschiedensten Anwendungen – von der Blechverarbeitung über die Maschinenbeladung bis hin zur Qualitätssicherung. Der Magnetgreifer von Leverage Robotics wurde speziell für den Einsatz mit 2-Finger-Greifern entwickelt. Dank seines passiven Funktionsprinzips benötigt er keine externe Strom- oder Druckluftzufuhr. In diesem Beitrag werfen wir einen detaillierten Blick auf die Technologie, Spezifikationen und Einsatzbereiche des Magnetgreifers von Leverage Robotics.
Funktionsweise von Magnetgreifern
Magnetgreifer sind eine effiziente Lösung zur Handhabung von ferromagnetischen Werkstücken in der industriellen Automatisierung. Im Gegensatz zu mechanischen oder vakuumbasierten Greifsystemen nutzen sie die Kraft eines Magnetfeldes, um Metallteile sicher zu fixieren und wieder freizugeben. Je nach Bauart und Anwendung unterscheidet man zwischen permanenten, elektromagnetischen und elektropermanenten Magnetgreifern.
- Elektromagnetische Greifer erzeugen ihr Magnetfeld durch eine elektrische Spule. Sie bieten eine steuerbare Haltekraft und benötigen durchgehenden Strom, um ein Werkstück zu halten.
- Elektropermanente Magnetgreifer kombinieren beide Prinzipien: Sie benötigen nur kurzzeitig Strom zum Aktivieren oder Deaktivieren des Magnetfelds, halten das Werkstück jedoch ohne ständige Energiezufuhr.
- Permanent-Magnetgreifer erzeugen ihre Haltekraft durch Dauermagneten und benötigen keine externe Energiequelle. Die Greif- und Lösefunktion erfolgt meist mechanisch, z. B. durch einen Schieber oder eine Bewegung des Greifers.
Einflussfaktoren auf die Greifkraft von Magnetgreifern
Die Greifkraft eines Magnetgreifers hängt von mehreren Faktoren ab, die sowohl von der Bauweise des Greifers als auch von den Eigenschaften des Werkstücks beeinflusst werden. Um eine optimale Haltekraft und eine zuverlässige Handhabung zu gewährleisten, müssen diese Parameter berücksichtigt werden:
Material
Magnetkraft wirkt ausschließlich auf ferromagnetische Materialien wie Stahl und Eisen. Auch die Legierung des Materials beeinflusst die Magnetisierbarkeit. Hochlegierte Stähle sind schwer oder gar nicht zu greifen.
Oberflächenbeschaffenheit
Glatte Oberflächen sorgen für eine größere Kontaktfläche und damit für eine höhere Haltekraft, während raue, verunreinigte oder beschichtete Oberflächen wie Rost, Lackierungen oder Ölfilme den Magnetfluss stören und die Greifkraft reduzieren können. Ein direkter Kontakt zwischen Magnet und Werkstück maximiert die Haltekraft.
Werkstückgröße und Temperatur
Dickere Bauteile können mehr Magnetfluss aufnehmen und bieten somit eine bessere Haltekraft, während dünne Werkstücke oder schmale Kanten die magnetische Kontaktfläche verringern und damit die Greifkraft reduzieren. Flache, gleichmäßige Bauteile lassen sich leichter greifen als unregelmäßige Formen mit Luftspalten. Ein weiterer wichtiger Faktor ist die Temperatur des Werkstücks, da hohe Temperaturen die Magnetisierung eines Permanentmagneten reduzieren können.
Position des Greifers
Das Werkstück sollte möglichst zentral oder in der Nähe seines Schwerpunkts gegriffen werden, um ein Kippen oder Verrutschen zu vermeiden. Ungünstige Greifpunkte können zu Drehmomenten führen, die die Haltekraft beeinträchtigen.

Modulare Magnetgreifer von Leverage Robotics
Der MagnetGripper von Leverage Robotics bietet eine flexible und effiziente Lösung für die Handhabung ferromagnetischer Bauteile in der industriellen Automatisierung. Dank seines modularen Aufbaus lässt er sich einfach in bestehende Robotersysteme integrieren und ermöglicht eine präzise, sichere Handhabung unterschiedlichster Metallwerkstücke.
889,00 € zzgl. MwSt.
Produktlink: Magnet Gripper ToolCube
Vorteile des MagnetGrippers
- Flexibel einsetzbar – Anpassbar an verschiedene Robotersysteme
- Modulares Design – Ermöglicht einfache Erweiterung und Anpassung
- Hohe Greifsicherheit – Ideal für präzise Handhabung von Metallteilen
- Einfache Integration – Schnell einsetzbar durch standardisierte Schnittstellen
- Robust & langlebig – Entwickelt für den industriellen Einsatz
Technische Daten
- Maximales Greifgewicht: 300 g (abhängig von Legierung und Oberflächenstruktur)
- Gewicht des Greifers: 323 g
- Kraftbereich: 40 N
- Anzahl der Greifkontakte: 2
- Betriebsart: Passiv – Steuerung über 2-Finger-Greifer
- Betriebstemperatur: 0 °C bis 50 °C
- Schutz vor Verunreinigungen: Muss vor starkem Schmutz und Staub geschützt werden
- Integration in unterschiedliche Robotertypen (Industrieroboter & Cobots) – Einfache Anpassung an moderne Automatisierungssysteme
Abmessungen (in mm)
- Breite: 82,4 mm
- Tiefe: 74 mm
- Höhe: 108,6 mm
Einsatzbereiche des MagnetGrippers
Dank seiner kompakten Bauweise, hoher Haltekraft und einfacher Integration in verschiedene Robotersysteme ermöglicht er vielseitige Einsatzmöglichkeiten in der Industrie.
Automatisierter Werkzeugwechsel
Der Magnetgreifer von Leverage Robotics ist als Teil des modularen ToolCube-Systems konzipiert und ermöglicht den schnellen und automatisierten Wechsel von Greifern oder Werkzeugen innerhalb einer Roboterzelle. Dadurch lassen sich Produktionslinien flexibel an unterschiedliche Werkstücke anpassen, während Stillstandszeiten auf ein Minimum reduziert werden.
Handhabung von Blechen und Metallteilen
Mit seiner starken Haltekraft eignet sich der Greifer optimal für das sichere Greifen und Bewegen flacher, ferromagnetischer Werkstücke wie Stahlbleche, Platinen oder Gussteile. In der Blechbearbeitung, Metallveredelung und Fertigungstechnik sorgt er für eine zuverlässige und beschädigungsfreie Handhabung.
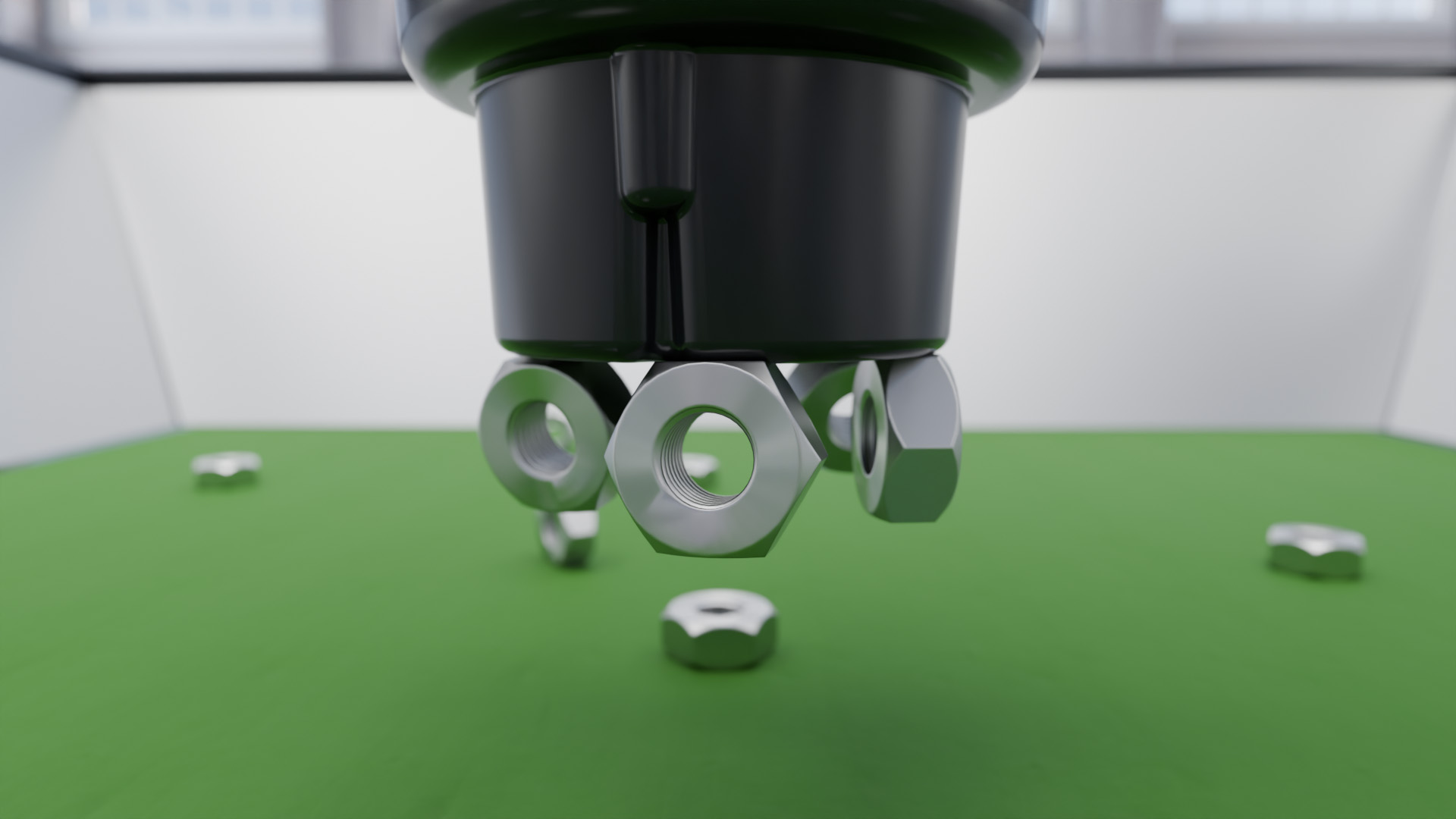
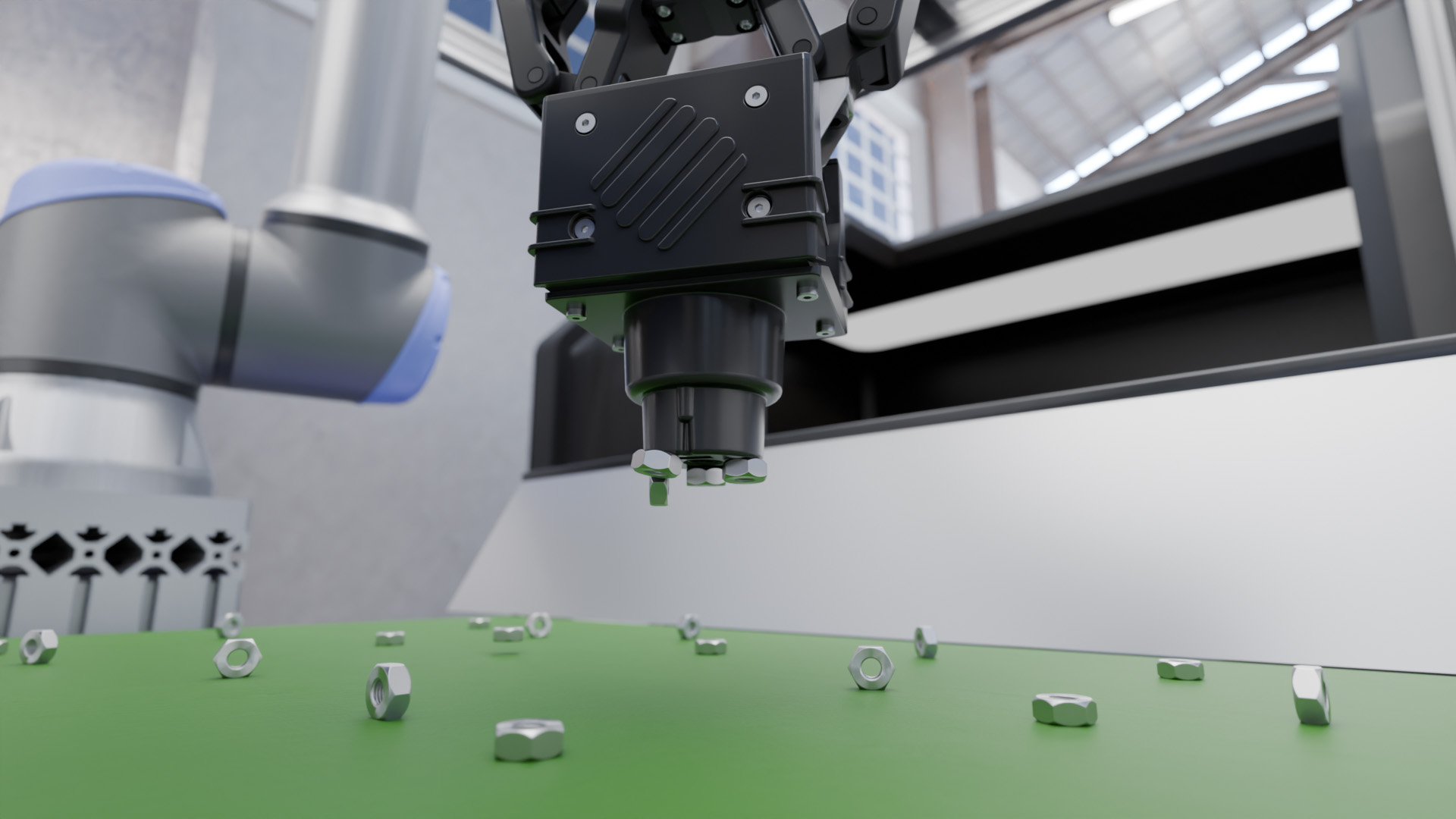
Schüttgutverarbeitung
Der Magnetgreifer ermöglicht die effiziente Aufnahme und Positionierung von metallischen Kleinteilen aus Schüttgutbehältern oder Kisten. Dank der intelligenten Steuerung kann der Greifer selbst zufällig angeordnete Teile sicher erfassen und für nachfolgende Bearbeitungsschritte bereitstellen.
Qualitätssicherung und Prüftechnik
Für automatisierte Prüfprozesse spielt der Magnetgreifer eine wichtige Rolle, indem er Metallkomponenten präzise für Maßhaltigkeitskontrollen oder Oberflächeninspektionen positioniert. Die hohe Wiederholgenauigkeit gewährleistet eine zuverlässige Handhabung in Inline-Qualitätskontrollen, während fehlerhafte Werkstücke direkt aussortiert werden können.
Maschinenbeladung und -entladung
Der Greifer erleichtert das automatische Be- und Entladen von CNC-Maschinen, Pressen oder Schweißrobotern. Durch seine zuverlässige Haltekraft und die Möglichkeit, den Magnetismus gezielt zu steuern, sorgt er für eine sichere Materialhandhabung.
Integration in kollaborative Robotik (Cobots)
Durch sein geringes Eigengewicht und die intuitive Steuerbarkeit ist der Magnetgreifer optimal für den Einsatz mit kollaborativen Robotern geeignet. In der Feinmontage, Logistik oder flexiblen Fertigung ermöglicht er eine sichere und effiziente Handhabung ferromagnetischer Bauteile.
Logistik und Materialfluss
In Lager- und Fördersystemen sorgt der Magnetgreifer von Leverage Robotics für eine schnelle, zuverlässige und positionsgenaue Handhabung metallischer Bauteile. Durch seine hohe Haltekraft und die flexible Steuerung lassen sich Transportprozesse automatisieren und der Materialfluss optimieren.

Fazit
Der Magnetgreifer von Leverage Robotics bietet eine effiziente, zuverlässige und flexible Lösung für die automatisierte Handhabung ferromagnetischer Bauteile. Dank seines passiven Funktionsprinzips kommt er ohne externe Strom- oder Druckluftzufuhr aus, was ihn besonders energieeffizient und wartungsarm macht. Die präzise Haltekraft und die einfache Integration in 2-Finger-Greifsysteme ermöglichen vielseitige Einsatzmöglichkeiten – von der Blechverarbeitung über die Maschinenbeladung bis hin zur Qualitätssicherung.
Durch die robuste Bauweise und das modulare Design kann der Magnetgreifer flexibel an verschiedene Robotersysteme angepasst werden, einschließlich industrieller Roboter und Cobots. Die hohe Wiederholgenauigkeit und Haltekraft gewährleisten eine sichere und präzise Handhabung.
Mit seiner Kombination aus Leistungsfähigkeit, Kompaktheit und einfacher Steuerung ist der Magnetgreifer ein ideales Werkzeug für Unternehmen, die ihre Automatisierungsprozesse optimieren und gleichzeitig ihre Betriebskosten senken möchten.
Optimieren Sie Ihre Automatisierung mit dem Magnetgreifer von Leverage Robotics
Steigern Sie die Effizienz und Präzision Ihrer Produktionsprozesse mit unserem modularen Magnetgreifer – energieeffizient, flexibel und einfach in bestehende Systeme integrierbar.
FAQ – Häufig gestellte Fragen zu Magnetgreifern
Welche Materialien sind für den Magnetgreifer geeignet?
Der Magnetgreifer kann ausschließlich ferromagnetische Materialien sicher greifen. Dazu gehören Stähle mit hohem Eisenanteil wie Baustahl (z. B. S235, S355), Werkzeugstahl sowie bestimmte Edelstähle mit ferritischen oder martensitischen Gefügen (z. B. 1.4016). Auch Gusseisen wie Grauguss (GG) und Sphäroguss (GGG) sowie einige Nickel-Eisen-Legierungen (z. B. Permalloy) sind magnetisch und damit geeignet.
Nicht geeignet sind nicht ferromagnetische Metalle wie Aluminium, Kupfer, Messing, Titan, Blei und Zink sowie austenitische Edelstähle (z. B. 1.4301, 1.4404, 1.4571), die keine magnetische Reaktion zeigen.
Besondere Materialeigenschaften wie Verzinkung, Oxidationsschichten oder hohe Nickel- und Chromgehalte können die Haltekraft reduzieren. Dünne Bleche können sich beim Greifen durchbiegen, was die Stabilität der Handhabung beeinflusst. Falls das Werkstück nicht magnetisch ist, stehen alternative Greiftechnologien wie Vakuum-, mechanische oder Klemmgreifer zur Verfügung.
Wie funktioniert die Greif- und Lösemechanik des Magnetgreifers von Leverage Robotics?
Der Magnetgreifer arbeitet mit einem passiven Funktionsprinzip und benötigt keine externe Strom- oder Druckluftzufuhr. Das Ein- und Ausschalten des Magnetfelds erfolgt mechanisch über den 2-Finger-Greifer des Roboters. Durch gezielte Bewegung wird das Werkstück entweder fixiert oder freigegeben.
Wie wirkt sich eine Beschichtung auf die Haltekraft aus?
Beschichtete, lackierte oder oxidierte Oberflächen können die Haltekraft verringern, da sie einen Luftspalt zwischen Magnet und Werkstück erzeugen. Besonders bei dicken Beschichtungen oder Verzinkungen sollte geprüft werden, ob die Greifkraft für die Anwendung ausreichend ist.
Wie groß und schwer darf ein Werkstück sein, damit es sicher vom MagnetGripper gehalten wird?
Die maximale Haltekraft des MagnetGrippers hängt von mehreren Faktoren ab, darunter Material, Oberflächenbeschaffenheit, Werkstückdicke und Kontaktfläche. Der MagnetGripper von Leverage Robotics kann Werkstücke mit einem Gewicht von bis zu 300 g sicher halten, wobei sich dieser Wert je nach Legierung und Oberflächenbeschaffenheit verändern kann.
Wie reagiert der MagnetGripper auf plötzliche Stromausfälle?
Da der Magnetgreifer von Leverage Robotics ein passives System ohne Stromzufuhr ist, bleibt die Haltekraft auch bei einem Stromausfall bestehen.