The two Vacuum Grippers kcan perform suction gripping tasks without an additional vacuum pump. By squeezing the gripper, a strong vacuum is generated at the suction cups, which, depending on the nature of the surface, also allows long-term lifting. But even with slightly roughened surfaces,the suction power is sufficient to swiftly implement a pick and place task.
Center Gripper
The Center Gripper centers objects for axial joining. This ToolCube allowsobjectsto be precisely centered underneaththe gripper for precise joining of,for example, screws, washers, bolts, pins, and much more. Light objects can also be gripped from the inside at boreholes.
Magnet Gripper
The Magnet Gripper is also a purely passive tool and requires no external connections.The robot gripper activates anddeactivates magnetism in order to be able to gripcomponents with ferromagnetic properties (e.g. screws, nuts,brackets, top-hat rails, etc.).
Surface Gripper
Large, heavy and flat objects can be gripped with the Surface Gripper. The principle is similar to that of a window lifter. The force of the gripper generates a very high adhesive force on smooth surfaces, with which even heavy objects up to 5 kg are gripped firmly and securely.
The Robotic Airbag received the KUKA Innovation Award from an international jury of robotics experts. During close collaboration between humans and robots, the Robotic Airbag encloses sharp-edged tools and workpieces, protecting humans from injury.
The Robotic Airbag is activated before any rapid robot movement and inflates to provide protection. In the event of a collision with the human, only soft contact occurs. If the robot stops, the Robotic Airbag retracts and frees the tool and workpiece. This allows robotic applications to be carried out with maximum precision and complete functionality.
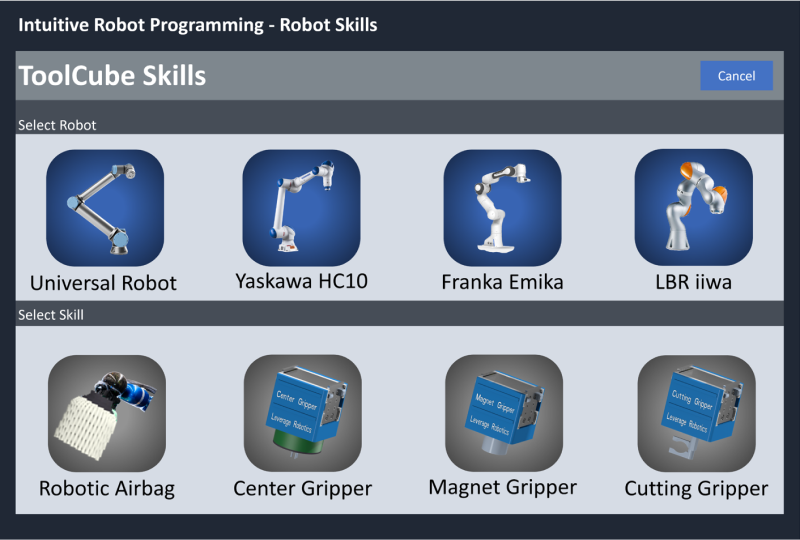
ToolCube Skills
With the appropriate software extension for Universal Robots, the Leverage Robotics ToolCubes can be seamlessly integrated into the teaching of the robot. Select the tool, guide the robot in zero-gravity mode to the action location and activate it. Using a foot pedal (part of the FlexAssemblyCell), both hands remain free to guide the robot throughout the teaching process. Like a co-worker, show the robot which task to perform. The robot then performs the task repeatedly and only by showing you. Simple tasks can be performed without writing a single line of code.